Read time: 1 minute
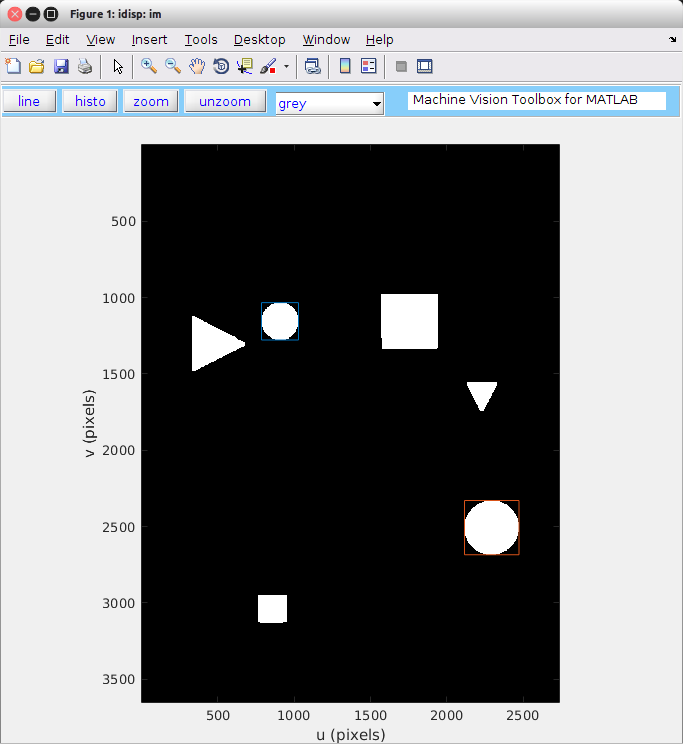
I modified some limits of circularity that is used to recognize the shape. Also now when calling the function, it displays the image with the shapes highlighted with a bounding box.
The original image (importme.jpg) is:
 So the whole process is:
So the whole process is:
im = iread('importme.jpg', 'double');
im2 = igamm(im, 'sRGB');
r = getColor(im2, 'red');
Do you want to set threshold value?[y/n]n
OK entering applying default threshold...
thresholdRed =
0.4500
thresholdGreen =
0.4500
thresholdBlue =
0.4500
rc=getShape(r,'circle');
The code for the functions can be seen at: https://github.com/mandeeps708/RoboticVision